6DOF Mouse - manipulator do sterowania w 6 stopniach swobody - GTIN 5906601652202



Opis urządzenia
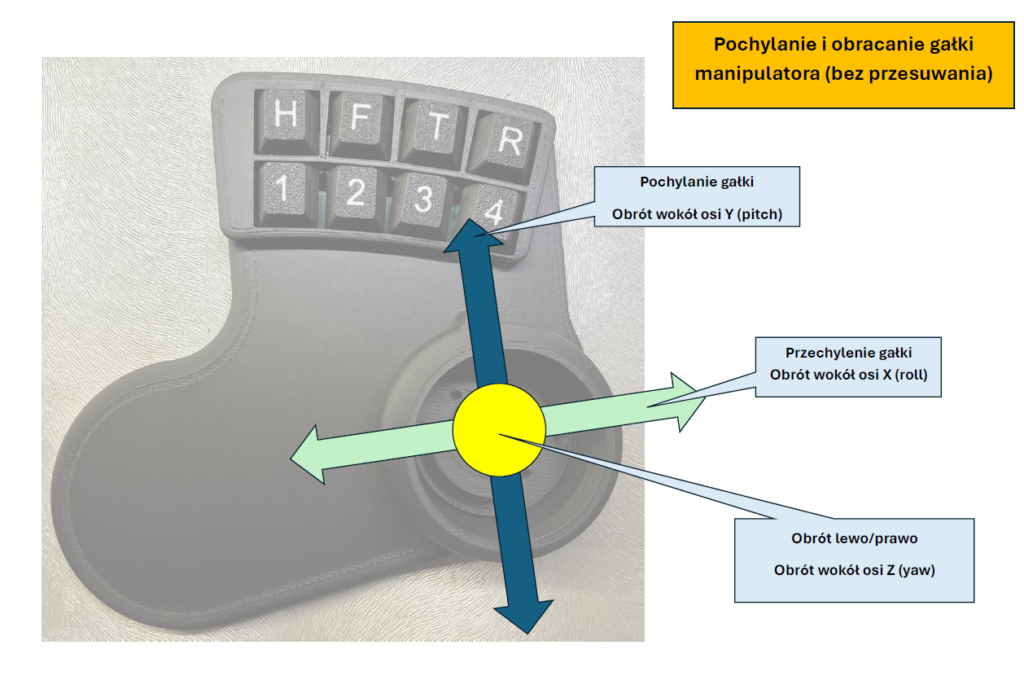
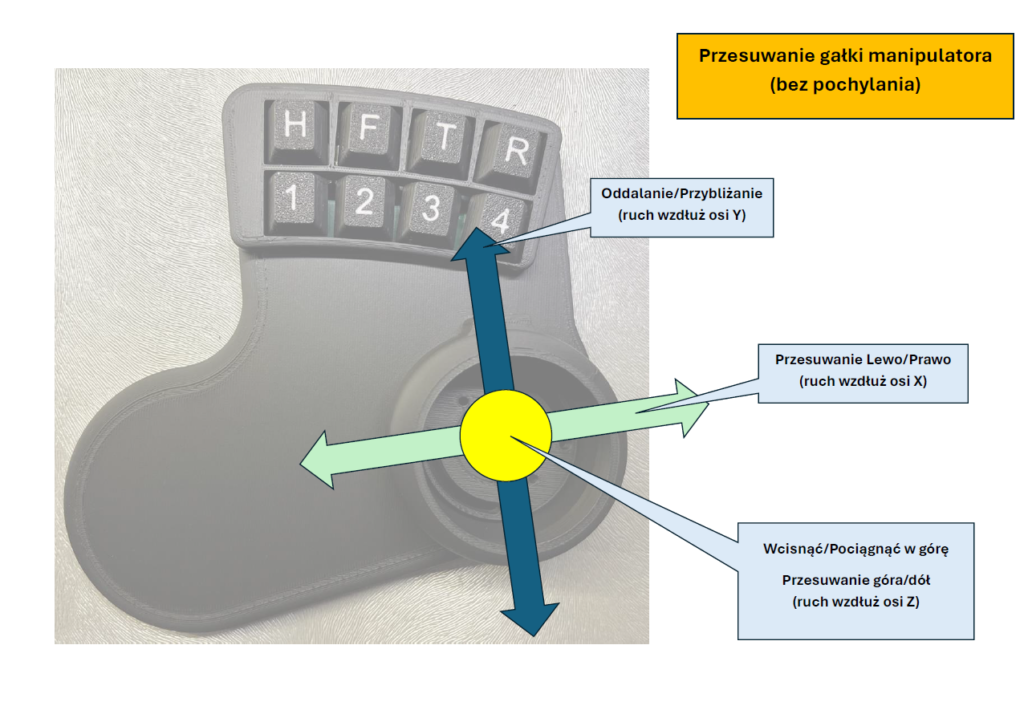
Manipulator 6-osiowy umożliwiający sterowanie m.in. zobrazowaniem na ekranie. Pozwala na wykonywanie obrotu obiektu/zobrazowania wokół osi X, Y, Z oraz przesuwanie obiektu/obrazu wzdłuż tych osi. Możliwa jest praca równocześnie we wszystkich stopniach swobody lub w trybie blokowania, gdzie aktywny jest dominujący w danym momencie stopień swobody.
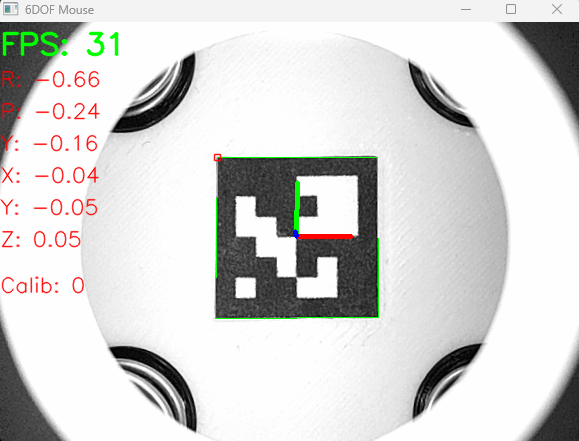
Urządzenie wykorzystuje wbudowaną mikro-kamerę oraz przetwarzanie obrazu z niej do estymacji położenia czujnika w kartezjańskim układzie współrzędnych przy równoczesnej transformacji kątowej Eulera. A tak po polsku: ruszamy gałką i wszystko się przesuwa oraz obraca wedle naszego życzenia 🙂
Sprzęt
Manipulator, w zależności od wybranego aktualnie presetu, może równocześnie generować dane HID (udawać joystick bądź gamepad), emulować wciśnięcia klawiszy klawiatury (i ich dowolne kombinacje) oraz ruchy osi myszy (x, y, scroll) i kliknięcia/przyciśnięcia przycisków myszy. Daje to sumarycznie nieograniczone możliwości kontrolowania różnych programów w komputerze. Dołączone do oprogramowania przykłady presetów pozwalają na integrację manipulatora 6DOF z różnymi aplikacjami.
Możliwe są różne poziomy integracji, od najprostszej, gdzie urządzenie emuluje równocześnie mysz oraz wybrane klawisze klawiatury (np. ruch myszy, z równocześnie wciśniętym LPM+SHIFT). Takie proste integracje już pozwalają na pracę w oprogramowaniu klasy CAD, wygodne manipulowanie zdjęciami czy mapami (np. Google Maps). Do oprogramowania manipulatora 6DOF dołączony jest również przykład zaawansowanej integracji z aplikacją CAD Autodesk Fusion 360, gdzie manipulator steruje zobrazowaniem tworzonego obiektu przestrzennego w 6 stopniach swobody wykorzystując interfejs API Fusion 360.
Oprogramowanie
Główną zaletą tego manipulatora jest możliwość samodzielnej modyfikacji oprogramowania, aby zintegrować go sobie na własne potrzeby. Kupując manipulator 6DOF, oprócz samego urządzenia, otrzymujesz:
1. Kody źródłowe firmware, dzięki czemu możesz modyfikować oprogramowanie wbudowane urządzenia. Pozwala to np. na zdefiniowanie zachowania się urządzenia podczas ruszania jego osiami oraz wciskania przycisków. Urządzenie pracuje równocześnie jako HID (joystick, gamepad), klawiatura i mysz. Możliwości integracji są zatem nieograniczone. Kody źródłowe firmware są zgodne z Arduino, co sprawia, że nawet osoby niezajmujące się programowaniem, powinny sobie poradzić.
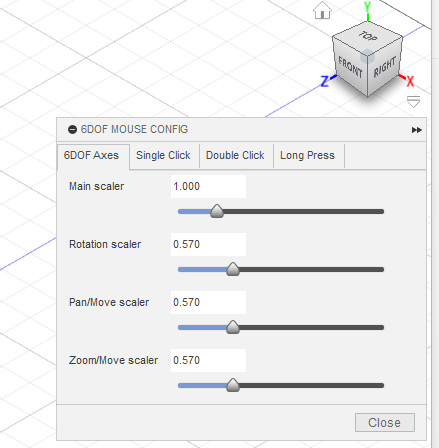
2. Oprogramowanie wykonywalne oraz kody źródłowe w języku Python na komputer PC. Ta część oprogramowania odpowiada za konfigurację sensora (m.in. jego czułość i kalibrację) oraz sterowanie presetami.
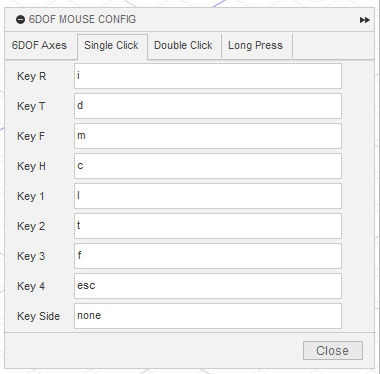
3. Gotowy AddIn wraz z kodem źródłowym do głębokiej integracji z Fusion 360. Dzięki temu, urządzenie od razu jest gotowe do bardzo komfortowego wsparcia pracy CAD w F360. Dołączone kody źródłowe (w języku API F360 – Python) pozwolą na ewentualne własne modyfikacje AddIn’u. Moduł pozwala na płynną pracę w 6 stopniach swobody oraz zdefiniowanie 24 przycisków szybkiego dostępu do funkcji. Mogą to być skróty klawiaturowe używane w F360 albo szybki wybór widoków projektowanego obiektu. Przyspiesza to znakomicie proces projektowania. Pozwala na pracę praktycznie bez odrywania rąk od myszy (w lewej 6DOF, w prawej klasyczna). Każdy z klawiszy manipulatora może mieć przypisane trzy alternatywne funkcje: na pojedyncze wciśnięcie, podwójne oraz długie. W samym firmware jest jeszcze możliwość zdefiniowania tzw. multi-click.
Dołączone kody źródłowe są napisane w sposób maksymalnie zrozumiały dla potencjalnego chętnego do modyfikacji. Nie ma tam ambitnych popisów deweloperskich, zakręconych pętli, itp. Intencją było to, aby kod był zrozumiały, a nie piękny 😉
Jeżeli nie potrafisz, bądź nie chcesz programować, a dostarczony pakiet presetów jest dla Ciebie niewystarczający, mogę pomóc w integracji z Twoim systemem/oprogramowaniem.
Zastosowanie w programach CAD - Fusion360
Zastosowanie w medycynie - CancerCenter.AI
Integracja Google Maps